Gli ingegneri del MIT progettano un microrobot volante che esegue 10 capriole in 11 secondi, imitando l’agilità di un insetto.
- Robot volanti minuscoli, veloci come insetti.
- Manovre acrobatiche, virate e accelerazioni estreme.
- IA per controllare voli complessi in tempo reale.
- Soccorsi in spazi ristretti, ispezioni sicure.
- Impatto ambientale: meno macchinari pesanti, meno rischi.
- Tecnologia con potenziale per le emergenze e la conservazione.
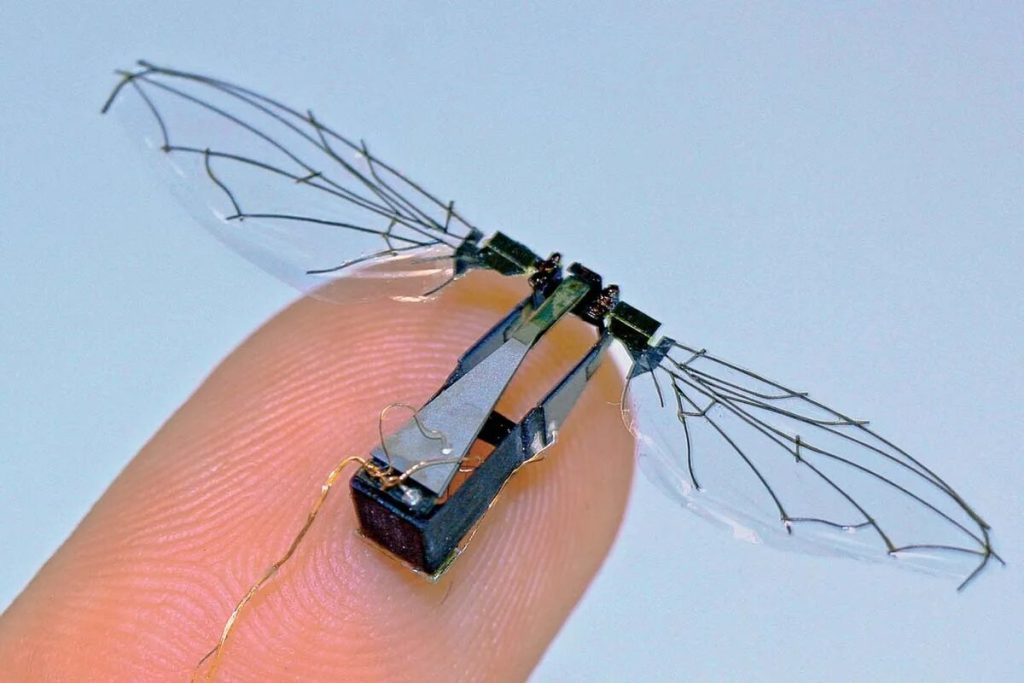
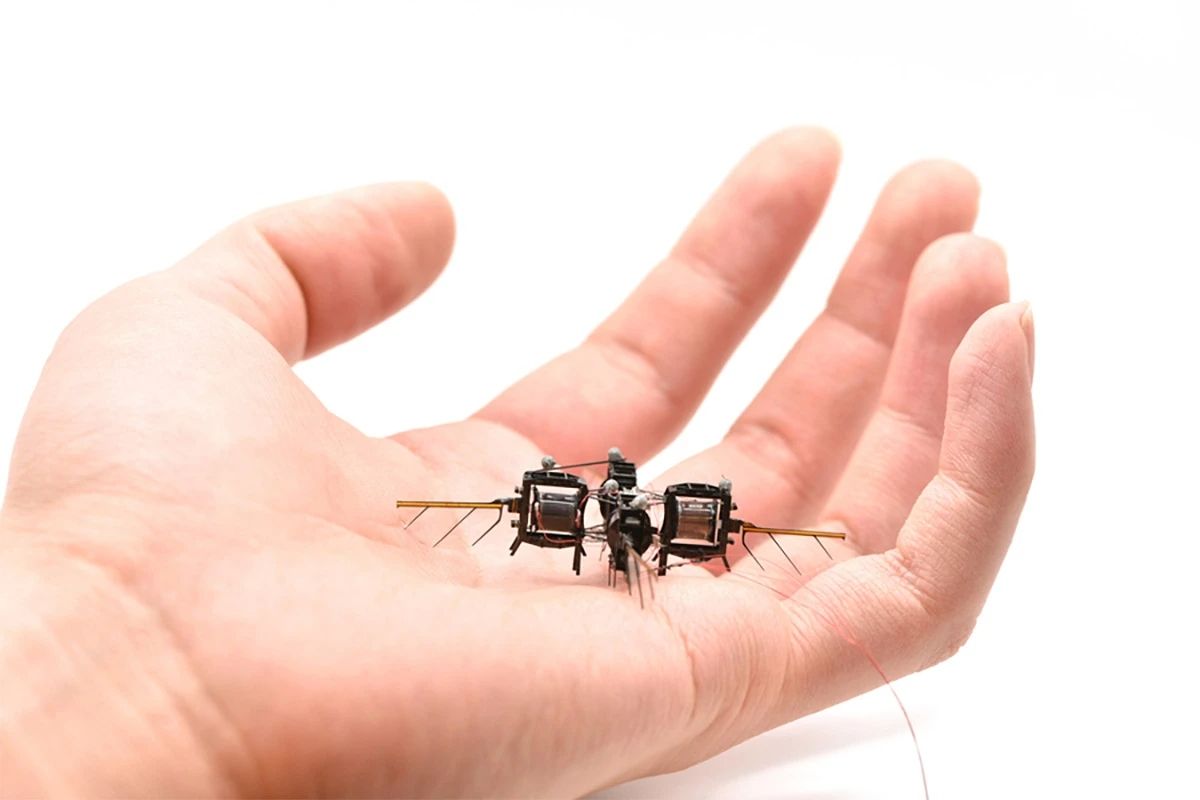
Gli ingegneri del MIT progettano un microrobot aereo in grado di volare veloce come un calabrone
In futuro, questi minuscoli robot volanti potrebbero aiutare nella ricerca di persone intrappolate sotto le macerie dopo un terremoto. Le loro dimensioni e agilità consentirebbero loro di accedere a spazi ristretti dove i droni convenzionali non potrebbero nemmeno entrare, schivando frammenti instabili o polvere sospesa.
Fino ad ora, i microrobot aerei erano riusciti solo a compiere voli lenti e traiettorie morbide, molto lontani dall’agilità di un insetto reale… fino ad oggi.
Un team collaborativo ha progettato un controller basato sull’intelligenza artificiale che conferisce a questo robot la capacità di eseguire traiettorie acrobatiche, comprese capriole continue. Con un’architettura di controllo divisa in due fasi, sono riusciti ad aumentare la velocità del 450% e l’accelerazione del 250% rispetto ai loro migliori prototipi precedenti.
Il risultato non è da poco: 10 capriole in 11 secondi senza deviare di più di 4-5 centimetri dalla traiettoria prevista, anche in presenza di raffiche d’aria.
Kevin Chen, professore associato del MIT e coautore dello studio, insiste sull’obiettivo finale: realizzare robot in grado di volare in ambienti in cui un drone convenzionale avrebbe gravi difficoltà, ma in cui un insetto si muoverebbe con fluidità.
Un controller basato sull’intelligenza artificiale
Il team di Chen ha trascorso anni a perfezionare questi robot. La versione più recente, leggermente più grande di una microcassetta e con un peso inferiore a quello di una graffetta, incorpora ali più grandi e muscoli artificiali morbidi in grado di battere ad altissime frequenze.
Il limite, tuttavia, era nel cervello: il controller veniva regolato manualmente, il che impediva di sfruttare il potenziale della meccanica del robot.
Per volare con aggressività e precisione insettile, era necessario un sistema in grado di gestire le incertezze, ottimizzare le manovre complesse e rispondere in millesimi di secondo. Il problema: qualsiasi controller sufficientemente potente era troppo costoso, dal punto di vista computazionale, per essere eseguito in tempo reale.
La collaborazione con il team di Jonathan How ha permesso un progresso fondamentale: un’architettura in due fasi, tanto robusta quanto agile.
In primo luogo, hanno sviluppato un controllore predittivo basato su modelli, in grado di prevedere il comportamento del robot e calcolare il piano ottimale per ogni manovra estrema. Questo pianificatore, sebbene impegnativo, è in grado di simulare curve, frenate brusche o serie di capriole tenendo conto dei limiti fisici e di sicurezza.
Da lì, hanno addestrato tramite imitazione una politica basata sull’apprendimento profondo, che condensa quell’intelligenza di alto livello in un modello leggero e adatto all’esecuzione in tempo reale. Il trucco è stato quello di generare la giusta quantità di dati di addestramento per non saturare il sistema e, allo stesso tempo, coprire tutti gli scenari critici.
Prestazioni paragonabili a quelle di un insetto
Nei test, il robot ha volato il 447% più veloce, ha accelerato il 255% in più e ha mantenuto una precisione straordinaria. È riuscito a compiere movimenti “saccadici”, quei bruschi cambiamenti di beccheggio che gli insetti utilizzano per orientarsi e stabilizzare la visione. Questa biomimetica apre la porta all’integrazione di telecamere e sensori in futuro per voli autonomi all’aperto.
La prossima sfida sarà quella di far volare questi microrobot senza dipendere da sistemi esterni di acquisizione del movimento. Si vuole anche studiare come evitare collisioni tra loro e come coordinare i voli di gruppo.
Esperti esterni, come Sarah Bergbreiter della Carnegie Mellon University, sottolineano la capacità del robot di mantenere manovre precise nonostante turbolenze superiori a 1 metro al secondo e le tolleranze tipiche della produzione su scala così piccola.
Sebbene il controller non sia ancora in esecuzione a bordo (richiede un computer esterno), i test indicano che versioni semplificate potrebbero funzionare sul robot stesso. Un progresso significativo per portare questa tecnologia a missioni reali.
Potenziale

Questa tecnologia ha il potenziale per diventare uno strumento decisivo in compiti che oggi richiedono risorse molto intensive. Potrebbe essere utilizzata per:
- Ispezionare impianti solari o eolici senza elicotteri o veicoli pesanti;
- Monitorare le foreste alla ricerca di focolai di incendio prima che si propaghino;
- Valutare i danni dopo tempeste o inondazioni senza mettere a rischio le squadre di soccorso;
- Mappare la biodiversità nelle aree protette senza disturbare la fauna.
Questo progresso non è solo una pietra miliare nel campo della robotica. È un modo per ridurre l’impatto, affrontare le emergenze più rapidamente e ampliare la portata della conservazione ambientale senza moltiplicare la nostra impronta tecnologica. Un piccolo robot con grandi ambizioni, e un esempio di come l’innovazione possa allinearsi – davvero – con un futuro più sostenibile.